





-
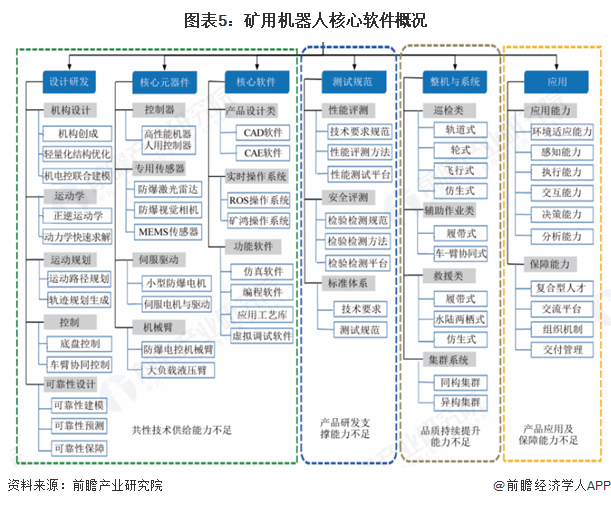
矿用机器人核心软件概况
发布时间:2025-05-29
在核心软件方面,机器人运动控制的ROS操作系统仍依赖进口,高精度视觉图像和自主导航等软件算法仍需深度攻关;在应用工艺机器人化方面,主要以辅助作业机器人为主,如煤仓清理、井下摊铺等尚未形成机器人应用,喷浆、管道安装、巷道修复等虽已具备一定的研究基础,但实用化程度仍需提高。
搜索
发布时间:2025-05-29
在核心软件方面,机器人运动控制的ROS操作系统仍依赖进口,高精度视觉图像和自主导航等软件算法仍需深度攻关;在应用工艺机器人化方面,主要以辅助作业机器人为主,如煤仓清理、井下摊铺等尚未形成机器人应用,喷浆、管道安装、巷道修复等虽已具备一定的研究基础,但实用化程度仍需提高。
 2025-05-29
2025-05-29
 2025-05-29
2025-05-29
 2025-05-29
2025-05-29
 2025-05-29
2025-05-29
 2019-01-14
2019-01-14
 2019-01-14
2019-01-14
 2019-01-14
2019-01-14
 2019-01-14
2019-01-14
 2019-01-14
2019-01-14
 2019-01-14
2019-01-14