-

车路云一体化通过协同感知增强个体智能体的感知能力
发布时间:2025-04-01
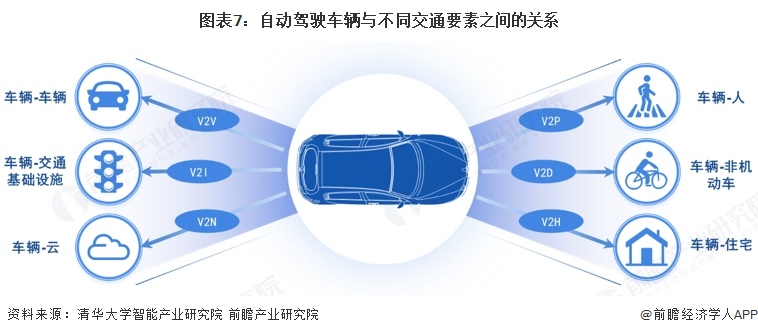
单车智能存在感知范围有限、易被遮挡、受环境和光线影响较大、难以预测等不足,而路端和云端感知可以充分发挥感知范围广、长时间连续观测、容易工程化等优势,与车端感知进行感知互补,实现遮挡、超视距、动静态盲区等协同感知,从而提升车辆的感知能力。车路云一体化系统的车端、路端和云端同时具备感知能力,都可以作为主车的感知信息源。主车周围车辆可通过V2V方式进行感知共享,路端感知系统和设施可通过V2I进行感知共享,云端平台也可以发挥数据优势,通过V2N方式进行数据共享,所有感知数据汇聚在车端进行融合处理,得到最终感知结果信息。