





-

车路云一体化通过网联化弥补单车智能的感知局限性
发布时间:2025-04-01
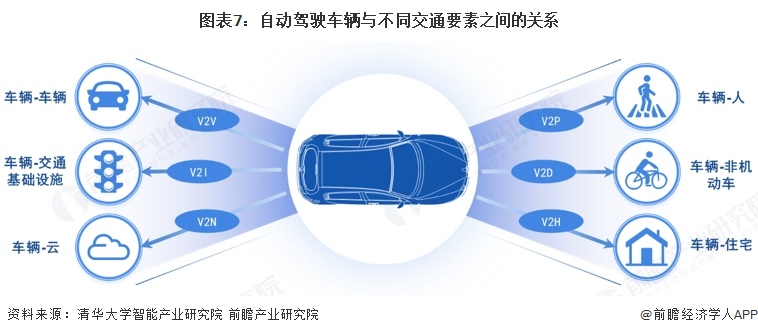
同时,由于单车智能在视野、视距、视效、信息获取等方面存在“感知局限性”,还面临算力物理上限、安全性威胁等问题。为实现更高效、全方位、超视距的感知,车路协同是目前存在可实现性的弥补式解决方案。通过网联赋能,将车与人、车与车、车与网、车与基础设施联结,实现汽车的协作式、自动化与网联化,从而弥补单车智能技术的不足,进而减少交通事故、提高交通效率。
搜索
发布时间:2025-04-01
同时,由于单车智能在视野、视距、视效、信息获取等方面存在“感知局限性”,还面临算力物理上限、安全性威胁等问题。为实现更高效、全方位、超视距的感知,车路协同是目前存在可实现性的弥补式解决方案。通过网联赋能,将车与人、车与车、车与网、车与基础设施联结,实现汽车的协作式、自动化与网联化,从而弥补单车智能技术的不足,进而减少交通事故、提高交通效率。
 2025-04-01
2025-04-01
 2025-04-01
2025-04-01
 2025-04-01
2025-04-01
 2025-04-01
2025-04-01
 2025-04-01
2025-04-01
 2025-04-01
2025-04-01
 2025-04-01
2025-04-01
 2025-04-01
2025-04-01
 2025-04-01
2025-04-01
 2025-04-01
2025-04-01